> For the complete documentation index, see [llms.txt](https://help.trikset.com/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://help.trikset.com/studio/2d-model/restrictions.md).
# Добавление ограничений в 2D-модель
* [Структура описания ограничений](/studio/2d-model/restrictions.md#struktura-napisaniya-ogranichenii)
* [Условия](/studio/2d-model/restrictions.md#usloviya)
* [Атомарные условия](/studio/2d-model/restrictions.md#atomarnye-usloviya)
* [Типы переменных и арифметические операции](/studio/2d-model/restrictions.md#tipy-peremennykh-i-arifmeticheskie-operacii)
* [Триггеры](/studio/2d-model/restrictions.md#triggery)
* [Названия датчиков](/studio/2d-model/restrictions.md#nazvaniya-datchikov)
* [Дополнительные свойства робота](/studio/2d-model/restrictions.md#dopolnitelnye-svoistva-robota)
* [Работа с экраном контроллера](/studio/2d-model/restrictions.md#rabota-s-ekranom-kontrollera)
* [Пример добавления ограничений](/studio/2d-model/restrictions.md#primer-dobavleniya-ogranichenii)
Для подготовки [упражнений](/studio/exercises.md) для учеников существует возможность внесения ограничений с помощью [редактирования XML-файла](/studio/2d-model/settings.md).
Ограничения бывают трех видов:
1. **Временны́е.**\
Например, лимит времени на исполнение задачи или конкретное действие в конкретный временной отрезок.
2. **Пространственные.**\
Например, добавление регионов («Старт», «Финиш») или запрет / принуждение робота, его датчика или какого-то подвижного предмета находиться в определенные промежутки времени в определенном месте.
3. **Ограничения на устройства.**\
Например, ограничение на набор датчиков или на поведение устройств.
## Структура написания ограничений
Для описания ограничений используется главный тег [`…`](/studio/2d-model/restrictions.md#less-than-constraints-greater-than-less-than-constraints-greater-than), в который вписываются все ограничения. Используется как контейнер. Ограничения описываются внутри тега, каждый дочерний тег должен быть одним из четырех:
| Тег | Описание |
| ------------------------------------------------------------------------------------------------------------------ | ----------------------------------------------------------------------------------------- |
| [timelimit](/studio/2d-model/restrictions.md#less-than-timelimit-greater-than) | Временное ограничение. |
| [constraint](/studio/2d-model/restrictions.md#less-than-constraint-greater-than-less-than-constraint-greater-than) | Ограничение с произвольным условием, при нарушении которого будет выдана заданная ошибка. |
| [event](/studio/2d-model/restrictions.md#event) | Основной инструмент задания динамических ограничений. Используется как контейнер. |
| [init](/studio/2d-model/restrictions.md#init) | Безусловное событие, выполняющееся перед началом выполнения программы. |
## \...\
Основной тег, в который вписываются все ограничения. Используется как контейнер.
```markup
```
## \
Временное ограничение. Является обязательным.
#### Атрибуты
| Атрибут | Описание |
| -------------------- | ----------------------------------------------------------------------------------------------------------- |
| **value="значение"** | Количество миллисекунд, через которое исполнение будет прекращено и выдана ошибка «Превышен лимит времени». |
#### Синтаксис
```markup
```
## \...\
Ограничение с произвольным условием, при нарушении которого будет выдана заданная ошибка. Может использоваться как контейнер. Имеет один дочерний тег: `...`.
#### Атрибуты
| Атрибут | Описание |
| ------------------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **checkOnce="true"** | Логический атрибут. Если в значении стоит true, то ограничение будет проверено 1 раз при старте программы и больше проверяться не будет.
Полезно, например, если нужно 1 раз проверить, что датчики расставлены верно, а дальше во время исполнения ничего не поменяется.
|
| **failMessage="Ошибка!"** | Сообщение об ошибке, которое будет показано при нарушении ограничения. |
#### Синтаксис
```markup
```
```markup
```
```markup
```
## \...\
Основной инструмент задания динамических ограничений. Используется как контейнер. Описывает строго одно событие.
Событие - это просто пара ([условие](/studio/2d-model/restrictions.md#usloviya), [триггер](/studio/2d-model/restrictions.md#triggery)).
#### Атрибуты
| Атрибут | Описание |
| ---------------------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **settedUpInitially="true"** | Атрибут, позволяющий указать взведено ли событие при старте программы. Событие может быть взведено или спущено (setted up и dropped). Во взведенном состоянии событие выполняет свой триггер по выполнению своего условия, в спущенном оно просто игнорируется системой. Значение по умолчанию — false. |
| **id="finish checker"** | Уникальный идентификатор события. По этому идентификатору можно обращаться к данному событию из других. Опциональный. |
| **dropsOnFire = "true"** | Логический атрибут, который указывает, продолжать ли быть событию взведенным после его срабатывания или нет. Опциональный. Значение по умолчанию -- true. |
#### Синтаксис
```markup
```
## \...\
Безусловное событие, выполняющееся перед началом выполнения программы.
#### Пример
```markup
```
## Условия
Теперь обсудим, какими могут быть условия в элементах [\](/studio/2d-model/restrictions.md#less-than-constraint-greater-than-less-than-constraint-greater-than) и [\](/studio/2d-model/restrictions.md#event). Условия задаются с помощью тега [\](/studio/2d-model/restrictions.md#condition) в случае, если проверяется только одно из [атомарных условий](/studio/2d-model/restrictions.md#atomarnye-usloviya), или тега [\](/studio/2d-model/restrictions.md#less-than-conditions-greater-than-less-than-conditions-greater-than), если проверяется составное условие.
## \...\
Внутри этого тега описывается проверяемое условие.
#### Пример
```markup
```
## \...\
Используется для создания составных условий. Обязательным атрибутом должна быть указана логическая связка. Связкой может быть `and` или `or`. Отрицание выражения задается тегом `` без атрибутов. Среди подвыражений могут также встречаться другие элементы \.
#### Атрибуты
| Атрибут | Описание |
| -------------- | ------------------ |
| **glue="and"** | Логическая связка. |
#### Синтаксис
```markup
```
## Атомарные условия
Атомарное условие представляет собой один из следующих элементов:
| Тег | Описание |
| ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ | ------------------------------------------------------------------------------ |
| [equals](/studio/2d-model/restrictions.md#equals), [notEqual](/studio/2d-model/restrictions.md#notequal), [greater](/studio/2d-model/restrictions.md#greater), [less](/studio/2d-model/restrictions.md#less) | Операции сравнения значений. |
| [inside](/studio/2d-model/restrictions.md#inside) | Позволяет задавать пространственные ограничения. |
| [settedUp и dropped](/studio/2d-model/restrictions.md#settedup) | Позволяет проверить, взведено событие или нет. |
| [timer](/studio/2d-model/restrictions.md#timer) | Позволяет задать время в мс, после которого данное условие считается истинным. |
## \...\
Равно. Операция сравнения значений функциональных символов. Может использоваться как контейнер.
#### Синтаксис
```markup
```
## \...\
Не равно. Операция сравнения значений функциональных символов. Может использоваться как контейнер.
#### Синтаксис
```markup
```
## \...\
Больше. Операция сравнения значений функциональных символов. Может использоваться как контейнер.
#### Синтаксис
```markup
```
## \...\
Меньше. Операция сравнения значений функциональных символов. Может использоваться как контейнер.
#### Синтаксис
```markup
```
## \
Позволяет задавать пространственные ограничения.
#### Атрибуты
| Атрибут | Описание |
| ---------------------------------- | ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **objectId="id"** | id взятого объекта. |
| **regionId="id"** | id взятого региона. |
| **objectPoint="center\|all\|any"** | Осуществляет проверку того, что:
center — центр объекта находится в зоне,
all — все точки объекта находятся в зоне,
any — хоть какая-то точка объекта находится в зоне
|
#### Синтаксис
```markup
```
## \ и \
Позволяет проверить, взведено событие или нет.
#### Атрибуты
| Атрибут | Описание |
| --------------- | ---------------------------------- |
| **id="event1"** | Идентификатор проверяемого события |
#### Синтаксис
```markup
```
#### Пример
В условиях события “check event” проверяется, что другое событие с id=”Try move” находится во взведенном состоянии, а событие с id=”Go back” опущено и не выполняется. Если оба эти условия после проверки возвращают значение true, то программа успешно завершается.
```markup
```
## \
Предикат, который начинает выдавать true, когда с момента взведения данного события прошло заданное время, а до этого момента выдает false.
#### Атрибуты
| Атрибут | Описание |
| ----------------------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **timeout="1000"** | Промежуток времени, через которой данный предикат станет истинным. Обязательный, значение должно быть неотрицательным и целочисленным. |
| **forceDropOnTimeout="true"** | Логический атрибут, позволяющий опустить событие, которое имеет в условии данный таймер. Если выставлен в true, событие будет опущено даже при наличии других активных таймеров и невыполненных условий. Опциональный. Значение по умолчанию -- true |
#### Синтаксис
```markup
```
#### Пример
Рассмотрим использование \ c различными значениями атрибута forceDropOnTimeout .
В событии “check region” проверяются временное и пространственное ограничения. Первое условие (timer) становится истинным спустя 1000мс, а до этого момента ложно. После этого его значение больше не изменяется. Второе условие (inside) проверяет, что робот находится в регионе с id=”start\_zone”. В тот момент, когда оба этих условия будут выполнены одновременно, программа будет выполнена успешно.
1\. Т. к. атрибут forceDropOnTimeout равен "false", то после заданного количества времени событие будет продолжать оставаться взведенным и ждать выполнения второго условия.
```markup
```
2\. Т. к. атрибут forceDropOnTimeout равен "true", то после заданного количества миллисекунд событие будет опущено, несмотря на наличие .другого условия. Таким образом, если в момент времени 1000 мс робот не находится в нужном регионе, то сообщение об успешном выполнении не будет выведено даже в случае, если робот окажется там спустя некоторое время.
```markup
```
## Типы переменных и арифметические операции
| Переменная | Описание |
| ----------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------------ |
| [int, double, string, bool](/studio/2d-model/restrictions.md#intdouble) | Целочисленная, дробная, строковая и логическая константы. |
| [variableValue](/studio/2d-model/restrictions.md#variablevalue) | Значение переменной. |
| [objectState](/studio/2d-model/restrictions.md#objectstate) | Взять состояние объекта. |
| [typeOf](/studio/2d-model/restrictions.md#typeof) | Взять метатип объекта с заданным идентификатором. |
| [minus, abs](/studio/2d-model/restrictions.md#minusabs) | Унарные арифметические функции, имеют ровно 1 дочерний элемент, значение которого должно быть целочисленным. |
| [sum, difference, min, max](/studio/2d-model/restrictions.md#summinmax) | Бинарные арифметические функции, имеют ровно 2 дочерних элемента, значение каждого из которых должно быть целочисленным. |
## \, \, \, \
Задание константы.
#### Атрибуты
| Атрибут | Описание |
| ------------- | ---------------------------- |
| **value="0″** | Значение заданной константы. |
#### Синтаксис
```markup
```
## \
Значение переменной.
Возможно взятие свойства какой-либо переменной, для этого используется точка. Например, значение rect.width вернет ширину прямоугольника, сохраненного в переменной rect.
#### Атрибуты
| Атрибут | Описание |
| -------------------- | -------------- |
| **name="my\_value"** | Имя переменной |
#### Синтаксис
```markup
```
## \
Взять состояние объекта.
#### Атрибуты
| Атрибут | Описание |
| --------------------------------------- | ------------------- |
| **object="robot1.display.labels.size"** | id взятого объекта. |
#### Синтаксис
```markup
```
#### Пример
```markup
```
## \
Взять метатип объекта с заданным идентификатором. Например: если взять `typeOf` объекта `wall` с `id=777`, то он вернет, что тип этого объекта `wall`.
Чаще всего этот элемент будет нужен для проверки типа подключенных датчиков и моторов.
#### Атрибуты
| Атрибут | Описание |
| ----------------- | ----------------------------------------- |
| **objectId="id"** | Уникальный идентификатор взятого объекта. |
#### Синтаксис
```markup
```
## \..\, \...\
Унарные арифметические операции отвечающие за изменение знака и взятие модуля числа.
#### Синтаксис
```markup
```
#### Пример
```markup
```
## \, \, \, \
Сумма и разность значений. Минимальное и максимальное значение.
#### Пример
```markup
```
## Триггеры
| Тег | Описание |
| ---------------------------------------------------------- | ----------------------------------------------------------------------------------------------------------------- |
| [trigger](/studio/2d-model/restrictions.md#trigger) | Действие или группа действий, которые будут выполнены один или множество раз по факту выполнения условия события. |
| [fail](/studio/2d-model/restrictions.md#fail) | Показать ошибку пользователю, завершить проверку задания. |
| [success](/studio/2d-model/restrictions.md#success) | Показать пользователю сообщение об успешном прохождении задания и завершить проверку. |
| [setter](/studio/2d-model/restrictions.md#setter) | Установить значение переменной. |
| [setUp, drop](/studio/2d-model/restrictions.md#setup) | Взводит или опускает событие |
| [message](#less-than-message-text-vash-tekst-greater-than) | Выводит текст |
## \...\
Действие или группа действий, которые будут выполнены один или множество раз по факту выполнения условия события.
#### Синтаксис
```markup
```
## \
Показать ошибку, завершить проверку задания.
#### Атрибуты
| Атрибут | Описание |
| ----------------------------- | ----------------------- |
| **message="Неверный ответ!"** | текст выведенной ошибки |
#### Синтаксис
```markup
```
## \
Задание успешно пройдено.
#### Атрибуты
| Атрибут | Описание |
| ---------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| deferred="false" | Опциональный. По умолчанию равен "false". При выставлении его в *true* данный триггер не остановит выполнение программы, т. е. чекер дождется конца программы и, либо скажет, что программа выполнена успешно, если ошибок не было, либо выпадет с ошибкой в противном случае. Другими словами атрибут *deferred* не позволяет получить ошибку "Программа закончилась, но задание не выполнено": программа либо завершится с успехом, либо с содержательной ошибкой типа "Превышен лимит времени". |
#### Синтаксис
```markup
```
## \...\
Установить значение переменной
#### Атрибуты
| Атрибут | Описание |
| ---------------- | ------------------- |
| name="my\_value" | Название переменной |
#### Пример
```markup
```
## \, \
Взводит или опускает событие
#### Атрибуты
| Атрибут | Описание |
| ----------------------- | --------------------- |
| **id="finish checker"** | id выбранного события |
#### Пример
```markup
```
## \
Выводит текст в консоль
**Атрибуты**
| Атрибут | Описание |
| -------------------- | ----------------- |
| text="Hello, world!" | Необходимый текст |
| | |
```javascript
При срабатывании такого триггера в консоль робота будет выведен текст "Hello, world!"
```
## Названия датчиков
#### Датчики для робота TRIK
| Название | Описание |
| ---------------------------------------------- | ------------------- |
| twoDModel::robotModel::parts::RangeSensor | Датчик расстояния |
| trik::robotModel::twoD::parts::TwoDLightSensor | Датчик освещенности |
| twoDModel::robotModel::parts::TouchSensor | Датчик касания |
| trik::robotModel::twoD::parts::LineSensor | Датчик линии |
#### Датчики для робота Lego EV3
| Название | Описание |
| ------------------------------------------------ | ----------------------------- |
| twoDModel::robotModel::parts::RangeSensor | Датчик расстояния |
| twoDModel::robotModel::parts::LightSensor | Датчик освещённости |
| twoDModel::robotModel::parts::TouchSensor | Датчик касания |
| twoDModel::robotModel::parts::ColorSensorRed | Датчик цвета (красный) |
| twoDModel::robotModel::parts::ColorSensorGreen | Датчик цвета (зеленый) |
| twoDModel::robotModel::parts::ColorSensorBlue | Датчик цвета (синий) |
| twoDModel::robotModel::parts::ColorSensorPassive | Датчик цвета (пассивный) |
| twoDModel::robotModel::parts::ColorSensorFull | Датчик цвета EVX/NXT (цвет) |
| twoDModel::robotModel::parts::ColorSensorAmbient | Датчик цвета EV3 (рассеянный) |
| ev3::robotModel::twoD::parts::GyroscopeSensor | Гиродатчик |
| ev3::robotModel::twoD::parts::GyroscopeSensor | Компас |
## Дополнительные свойства робота
| Свойство | Описание |
| ----------------------- | ------------------------------------------------------------------------------------------------------- |
| robot1.rotation | Позволяет узнать текущий угол поворота робота |
| robot1.x и robot1.y | Позволяет узнать координаты робота |
| robot1.led.color | Позволяет узнать цвет диода |
| robot1.marker.isDown | Проверяет, что у робота установлен маркер и он рисует линию на поле. Возвращает значения true или false |
| robot1.shell.lastPhrase | Узнать текст, который сказал робот |
## Работа с экраном контроллера
| Свойство | Описание |
| -------------------------------- | ----------------------------------------------------------------------------------------------------- |
| robot1.display.sadSmiles | Проверяет, что на экране контроллера установлен грустный смайлик. Возвращает значение true или false. |
| robot1.display.smiles | Проверяет, что на экране контроллера установлен веселый смайлик. Возвращает значение true или false. |
| robot1.display.labels.first.text | Текст сообщения (label), которое было выведено на экран первым. |
| robot1.display.labels.last.text | Текст сообщения (label), которое было выведено на экран последним. |
| robot1.display.labels.size | Узнать количество label-ов, выведенных на экран. |
#### Пример
Проверяем, что на экран контроллера было выведено слово “сообщение”. Регистр слова важен.
```markup
```
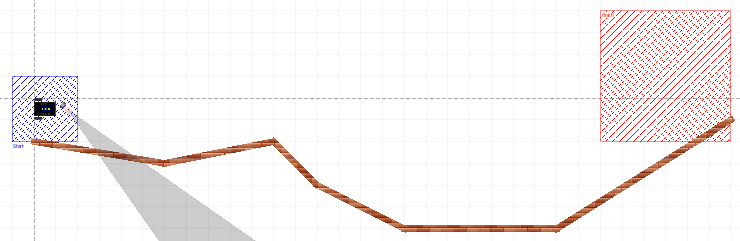
## Пример добавления ограничений
Стартовав в синем квадрате, необходимо проехать вдоль стены с помощью датчика расстояния ИК до красного квадрата.
```markup
```